● モデル図
簡単なトレーラー付き車両とドリー式フルトレーラーが付いた車両のモデル図です。
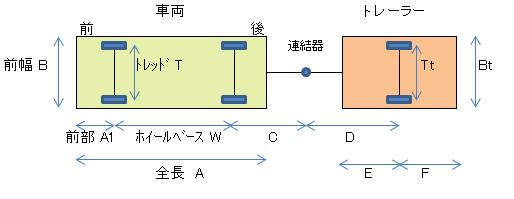
・簡単なトレーラー
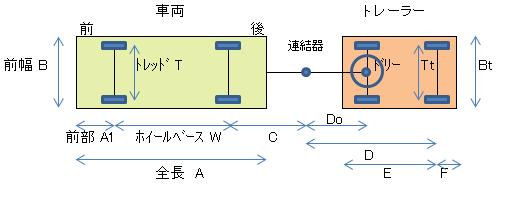
・ドリー式トレーラー
ドリー(ドーリー、Dolly)とはトレーラーの前軸台車で、連結部を中心に回転します。
● 各部の回転半径(Ri)の計算式
左側前輪の切れ角とαとし、その時の各部位の回転半径の計算式を示します。
(注)sqr : 平方根、^ : べき乗
・右側前輪の切れ角 β(アッカーマン理論曲線)
1/tanβ = 1/tanα + T/W
・簡単なトレーラー
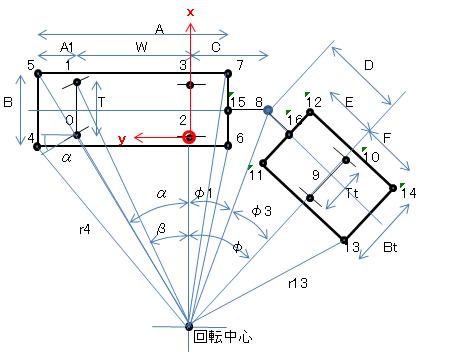
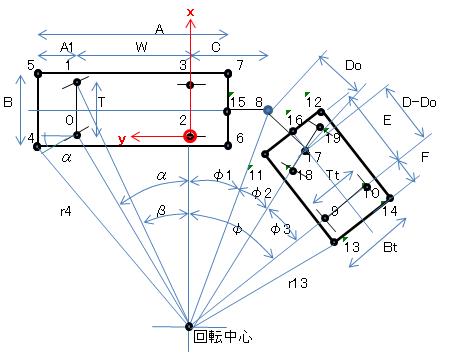
・ドリー式トレーラーR0 = W/sinα R2 = R1・cosα R1 = sqr[(R2+T)^2 + W^2] R3 = R2+T R4 = sqr[(R2-(B-T)/2)^2 + (W+A1)^2] R5 = sqr[(R2+T+(B-T)/2)^2 + (W+A1)^2] R6 = sqr[(R2-(B-T)/2)^2 + (W+A1-A)^2] R7 = sqr[(R2+T+(B-T)/2)^2 + (W+A1-A)^2] … 車両本体の計算式はここまで … R8 = sqr[(R2+T/2)^2 + C^2] R9 = sqr[R8^2 - D^2] - Tt/2 R10 = sqr[R8^2 - D^2] + Tt/2 R11 = sqr[(R9-(Bt-Tt)/2)^2 + E^2] R12 = sqr[(R10+(Bt-Tt)/2)^2 + E^2] R13 = sqr[(R9-(Bt-Tt)/2)^2 + F^2] R14 = sqr[(R10+(Bt-Tt)/2)^2 + F^2] R15 = sqr[(R2+T/2)^2 + (W+A1-A)^2] R16 = sqr[(R9+Tt/2)^2 + E^2]
R0~R7: 前項と同じ
R8 = sqr[(R2+T/2)^2 + C^2]
R17 = sqr[R8^2 - Do^2]
R18 = R17 - Tt/2
R19 = R17 + Tt/2
R9 = sqr[R17^2 - (D-Do)^2] - Tt/2
R10 = sqr[R17^2 - (D-D0)^2] + Tt/2
R11 = sqr[(R9-(Bt-Tt)/2)^2 + E^2]
R12 = sqr[(R10+(Bt-Tt)/2)^2 + E^2]
R13 = sqr[(R9-(Bt-Tt)/2)^2 + F^2]
R14 = sqr[(R10+(Bt-Tt)/2)^2 + F^2]
R15 = sqr[(R2+T/2)^2 + (W+A1-A)^2]
R16 = sqr[(R9+Tt/2)^2 + E^2]
(注)ドリー式トレーラーの計算式において、Do = 0 と置くと、R17=R8となり、前項の簡単なトレーラーの計算式に一致します。
● 各部の位置座標の計算式(ドリー式)車両本体の左後輪(点2)を原点とする図示座標系xyでのドリー式の各部位座標(xi, yi)の計算式を示します。
Do = 0 と置くと、簡単なトレーラーの計算式になります。
点8から点19までは、先ず車両本体とトレーラーが1直線上にある時の点8に対する相対座標を示します。x0 = 0 y0 = W x1 = T y1 = W x2 = 0 y2 = 0 x3 = T y3 = 0 x4 = -(B-T)/2 y4 = W+A1 x5 = T+(B-T)/2 y5 = W+A1 x6 = -(B-T)/2 y6 = W+A1-A x7 = T+(B-T)/2 y7 = W+A1-A x15 = T/2 y15 = W+A1-A … 車両本体の計算式はここまで …
旋回時の図中の角度 φ1、φ2、φ3、φ :x8 = T/2 y8 = -C x9 = -Tt/2 y9 = -D x10 = Tt/2 y10 = -D x11 = -Bt/2 y11 = -(D-E) x12 = Bt/2 y12 = -(D-E) x13 = -Bt/2 y13 = -(D+F) x14 = Bt/2 y14 = -(D+F) x16 = 0 y16 = -(D-E) x17 = 0 y17 = -Do x18 = -Tt/2 y18 = -Do x19 = Tt/2 y19 = -Do
次に、点9から点16(点15を除く)までの上記座標を点17の回りに角φ3だけ回転します。φ1 = atan[C/((R2+R3)/2)] φ2 = asin[Do/R8] φ3 = asin[(D-Do)/R17] φ = φ1 + φ2 + φ3
最後に、点9から点19(点15を除く)までを点8の回りに角φ=φ1+φ2+φ3だけ回転します。xi = xi・cosφ3 + (yi+Do)・sinφ3 yi = -xi・sinφ3 + (yi+Do)・cosφ3 - Do ここで、右辺の(xi, yi)は回転前の座標、左辺は回転後の座標。
xi = xi・cosφ + yi・sinφ yi = -xi・sinφ + yi・cosφ ここで、右辺の(xi, yi)は回転前の座標、左辺は回転後の座標。