トレーラー付きの車に対応しています。
最小回転半径(Minimum turning radius)とはステアリング(ハンドル)を一杯に切って旋回したときに、外側前輪の接地面の中心が描く半径をいいます。小型乗用車の最小回転半径は概ね4~5m程度です。
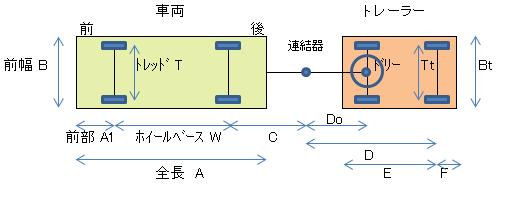
最小回転半径:Rminは前輪の車軸中心から後輪の車軸中心までの距離(ホイールベース):Wと、外側前輪の最大切れ角:θmaxから以下のように計算できます。
Rmin = W/sin(θmax)
ここでは、車の諸元をもとに任意のハンドル回転(切れ角)に対する4つの車輪とボディーの4隅に加えて、トレーラー部の回転半径を計算するとともに、走行軌跡を表示します。 また、前後の内輪の回転半径の差である内輪差と、外輪の回転半径の差である外輪差もあわせて計算・表示します。
・車のハンドル回転はマウスホイールの回転で行います。
・回転中心は赤の+字で表示されます。
・画面上のグリッド幅は1mです。
・車の前進(Start)、停止(Stop)、バック、初期位置復帰(Reset)ができます。
・クロソイド(clothoid)曲線に沿った走行ができます。
・各部の軌跡を個別に表示 On/Offすることができます。 各項目部をクリックします。
・画面右上部をクリックすると、走行(表示)スピード、ズーム倍率、原点位置の変更ができます。
項目名の上をクリックすると初期値に戻ります。
原点位置変更は描画画面上を直接クリックしてもOKです。
・ドリー Do = 0 とすると、ドリー式でない簡単なトレーラーとなります。
・軌跡表示ありの時、輪郭表示Onとすると各点の軌跡の代わりに時々刻々の車の輪郭が表示されます。
・ルート表示Onにすると、指定幅、角度の左折コーナーが表示されます。
(注0)黒●:座標原点、赤●:車の基準点(左後輪)、緑●:トレーラー連結器とドリー、赤+:旋回中心
(注1)全点軌跡表示の場合、次第に表示速度が遅くなる。
(注2)表下部の左側項目名「車の位置/回転半径」、「トレーラ位置/回転半径」をクリックすると、車本体部、トレーラー部それぞれ一括で表示On/Offの切り替えが可能。
(注3)トレーラーの内輪差*、外輪差*は車の前輪に対するトレーラー後輪の回転半径差。
(注4)左折角度欄で「任意折線」を選択すると、折線ルートを設定できる。
直前点を再度クリックすると削除できる。
新たな折線ルートを設定するには一旦15度~135度を選択後、再度「任意折線」を選択する。
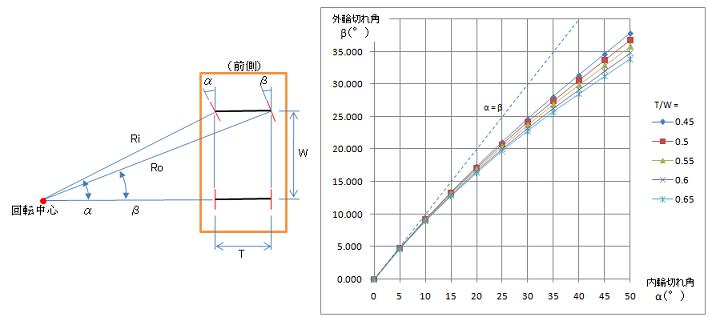
● 切れ角、回転半径とアッカーマン理論曲線
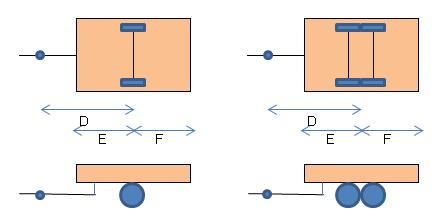
● センターアクスル式フルトレーラー
トレーラーの車体の中央に車軸があるもので、車軸が1個のものはDo = 0 で処理できます。
車軸が2個のものはその中間位置に車軸が1個あるものとし寸法 D、E、Fを与え、Do = 0 とします。
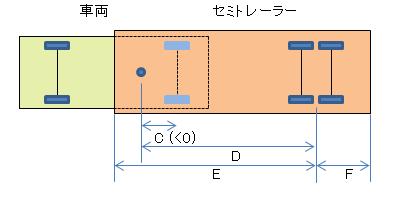
● セミトレーラー
図のようなセミトレーラーに対しては、連結器位置 C<0、Do = 0 で処理できます。
トレーラー車軸の中間位置で寸法 D、E、Fを与えます。