中心 P1(x1, y1, z1)、 半径 r1 の球面1
と次の2曲面:
球中心P1と点P2(x2, y2, z2)からの距離の和が等しい点の集合が作る曲面2
球中心P1と点P3(x3, y3, z3)からの距離の和が等しい点の集合が作る曲面3
の交点について検討します。
2点からの距離の和が等しい点の集合は回転楕円体ですので、球面と2つの回転楕円体の交点に関する話題です。
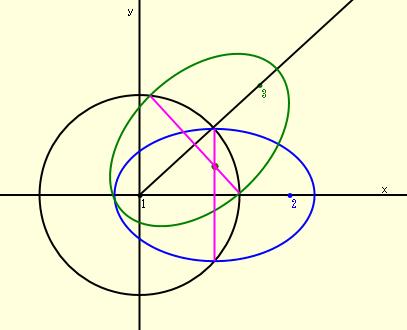
球面1と回転楕円体2の交線は(もしあるとすれば)円です。 同様に、球面1と回転楕円体3の交線も円です。
これら2つの交線(円)が図のような状態にあれば、球面と2つの回転楕円体が交わる(共有点を持つ)ことになります。
ここでは、これに関する計算式を示すとともに、確認のための簡単なアプリを作成しました。
・球面の中心P1を座標原点、点P2方向にx軸、
3点 P1、P2、P3を通る平面の法線ベクトル方向にz軸、
xyz座標系が右手直交座標系になるようにy軸をとります。
・次の値を入力します。
・球面の半径 r
・P2 のx座標(> 0)
・P3 のx、y座標
・各楕円体について、2点からの距離の和 を指定します。
・「計算」ボタンをクリックすると、計算結果(交点)を表示します。
●画面操作方法
・マウスホイールで表示図形の拡大縮小が可能。 ・a2/b2、a3/b3 は回転楕円体の係数。 ・px, py, pz は交点座標。●球面と回転楕円体の交線の求め方
球面1の中心を原点(0, 0, 0)とし、点P2はX軸上の(x2, 0, 0)にあるものとします。 球面1の式: x2 + y2 + z2 = r12 ・・・(式1.1) 回転楕円体の式: ( x - e )2/a2 + ( y2 + z2 )/b2 = 1 ・・・(式1.2) ここで、 x2 < L e = x2/2 a = L/2 ( L は中心P1、P2からの距離の和) b = ( a2 - e2 )1/2 (式1.2)の両辺に b2を乗ずると、 ( x - e )2(b/a)2 + y2 + z2 = b2 ・・・(式1.2') (式1.1)から(式1.2')を引くと、y, zが消去され、x に関する次の2次方程式が得られます。 Ax2 + Bx + C = 0 ここで、 A = a2 - b2 B = 2b2e C = -(be)2 - a2(r12 - b2 ) これより、交線である円のx座標が得られます。 球面1と回転楕円体3の交線もP1P2方向をX軸とする局所座標系で考えれば上と同様に求められます。 計算後、全体座標系での値に戻します。●球面と2つの回転楕円体の交点の求め方
上で得られた2つの交線(円)の交点が求める交点になります。 図の座標系で示す2本のピンクの交線(線分)の交点の求め方は以下のとおり。 球面1と回転楕円体2の交線を示す線分L12の両端点をQ2a(x2a, y2a), Q2b(x2b, y2b)、 球面1と回転楕円体3の交線を示す線分L13の両端点をQ3a(x3a, y3a), Q3b(x3b, y3b) とし、両線分をパラメータ s, t を用いて表すと、 L12: P = Q2a・(1-s) + Q2b・s (0≦s≦1) L13: P = Q3a・(1-t) + Q3b・t (0≦t≦1) これより、交点では Q2a・(1-s) + Q2b・s = Q3a・(1-t) + Q3b・t x座標、y座標で表現すると、 x2a・(1-s) + x2b・s = x3a・(1-t) + x3b・t y2a・(1-s) + y2b・s = y3a・(1-t) + y3b・t この連立方程式を解いて s, tを求め、0≦s≦1、0≦t≦1 であれば交点があります。 交点座標Pcは Pc = Q2a・(1-s) + Q2b・s